Difference between revisions of "Map Merger"
imported>SpaceManiac m (→Use as a Git Commit Hook: note) |
imported>SpaceManiac (Update Python 3.7 information) |
||
| (One intermediate revision by one other user not shown) | |||
| Line 5: | Line 5: | ||
== Basic Setup == | == Basic Setup == | ||
| − | # '''Install Python 3.6 | + | # '''Install Python 3.6''': If you don't already have Python installed, [https://www.python.org/downloads/ download and install] version 3.6 or later. |
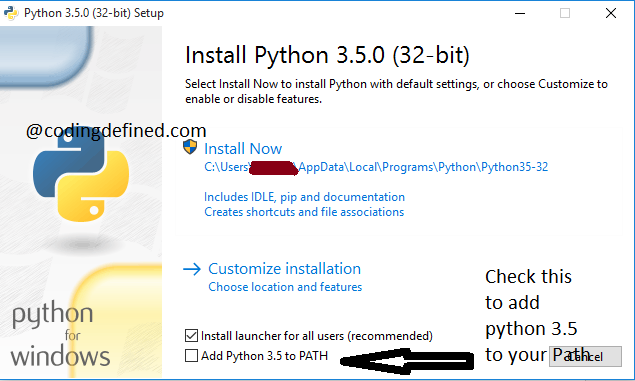
# '''Ensure Python is in your PATH''': For Windows users, ensure that you check the "Add Python 3.6 to PATH" option in the installer. - see [https://file.house/DA6H.png here for example] | # '''Ensure Python is in your PATH''': For Windows users, ensure that you check the "Add Python 3.6 to PATH" option in the installer. - see [https://file.house/DA6H.png here for example] | ||
# '''Install dependencies''': For Windows users, run <code>tools/mapmerge2/requirements-install.bat</code>. Non-Windows or advanced users can manually run <code>python -m pip install tools/mapmerge2/requirements.txt</code>. | # '''Install dependencies''': For Windows users, run <code>tools/mapmerge2/requirements-install.bat</code>. Non-Windows or advanced users can manually run <code>python -m pip install tools/mapmerge2/requirements.txt</code>. | ||
Latest revision as of 02:07, 19 January 2019
/tg/station uses a tool called the Map Merger to minimize differences between versions of maps and lay them out in a format known as TGM, developed by Remie. This makes changes easier for maintainers to review and less likely to conflict with changes made by others.
There are two ways of running the tool, each requiring some amount of setup. If you have trouble or need help, ask in #coderbus.
Basic Setup[edit | edit source]
- Install Python 3.6: If you don't already have Python installed, download and install version 3.6 or later.
- Ensure Python is in your PATH: For Windows users, ensure that you check the "Add Python 3.6 to PATH" option in the installer. - see here for example
- Install dependencies: For Windows users, run
tools/mapmerge2/requirements-install.bat. Non-Windows or advanced users can manually runpython -m pip install tools/mapmerge2/requirements.txt.
{kind=link}
Use as a Git Commit Hook (preferred)[edit | edit source]
This method requires slightly more setup, and requires you to be using git rather than just downloading the source, but requires no manual intervention after setup. For this reason, it is the recommended method.
- Install the hook: Windows users run
tools/hooks/install.bat. Other platforms runtools/hooks/install.sh.
Now, any time you create a commit, the map merger runs automatically and bases your changes on top of the previous version of the map stored in git. The dialog box or console output of the commit will show the map merger's log. You can check the git commit log to review changes, or run tools/mapmerge2/precommit.py manually to review changes before comitting.
Manual Use[edit | edit source]
This is the older method, and is simpler but requires careful manual use each time you want to make changes to the map. Each time you want to edit a map, follow these steps:
- Prepare maps: Run
tools/mapmerge2/Prepare Maps.batto save a backup of all maps in their current state. - Make your changes: Don't forget to save.
- Exit DreamMaker: Optional, but ensures that you don't accidentally undo the map merger's work.
- Run the map merger: Run
tools/mapmerge2/mapmerge.batand select the map you edited to merge.
Gotchas[edit | edit source]
Leaving the map open in DreamMaker or reviewing it after running the map merger makes it possible to accidentally save and overwrite the merged map with an unmerged map. Close DreamMaker entirely before running the map merger or be extra-careful not to overwrite the changes the map merger made.